Task: Simulate Rover Traversal on Varied Terrain
Objective
Design and simulate a rover navigating through different terrain conditions.
Scenario 1: Low Friction Terrain
- Surface: Flat terrain with low friction (sandy surface)

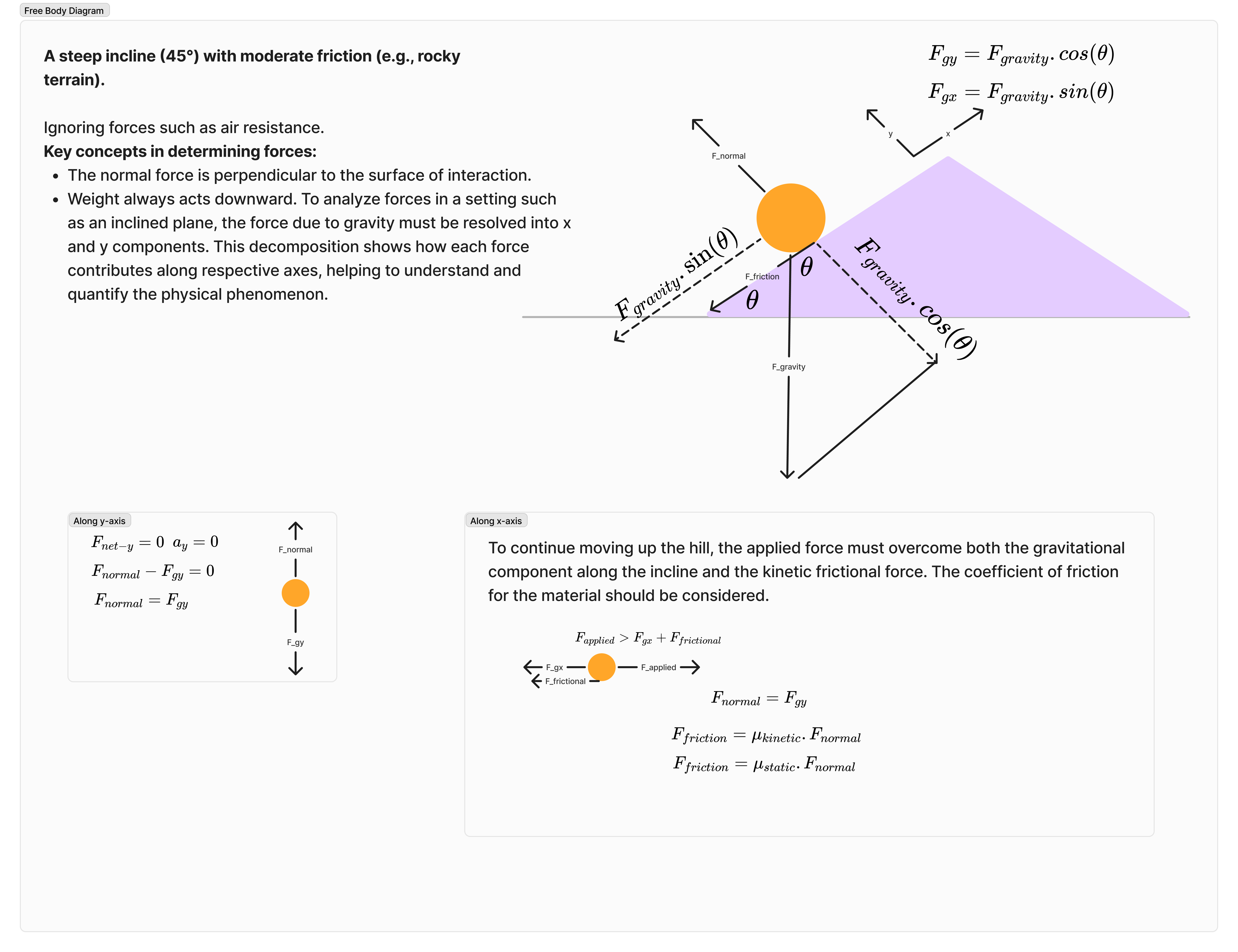
Scenario 2: Inclined Terrain
- Surface: 45° incline with moderate friction (rocky surface)
Implementation Details
Simulation Setup
- Point mass representation of rover
- Gazebo standalone simulation (gz-sim v9)
- Custom model plugin for force application and verification
- Mass: 20 kg
- Surface properties:
- Ground: μ = 0.3 (sand)
- Incline: μ = 0.3, angle = 30° (-0.5235987756 rad)
Task world
Simulation Results
-
Flat terrain
- Insufficient Force Test
[Phase 0] Applied Force: 29.43 N Position: 0.1166 0.0 0.1 m Velocity: 1.1054 0.0 -0.0000000366 m/s ❌ Moving with insufficient force.- Sufficient Force Test
[Phase 1] Applied Force: 58.86 N Position: 0.8386 0.0 0.1 m Velocity: 0.9069 0.0 -0.0000000033 m/s ✅ Moving correctly with sufficient force. -
Incline terrain
- Insufficient Force Test
[Phase 0] Applied Force: 111.692 N Position: 5.9633 0.0 0.240999 m Velocity: 3.71986 0.0 2.14882 m/s Distance to incline: 4.0367 m Reached incline: No ❌ Moving with insufficient force! ✅ Correctly unable to climb incline with insufficient force.[Phase 0] Applied Force: 111.692 N Position: 7.99245 0.0 1.41345 m Velocity: 1.57182 0.0 0.908648 m/s Distance to incline: 2.00755 m Reached incline: No ❌ Moving with insufficient force! ✅ Correctly unable to climb incline with insufficient force.- Sufficient Force Test
[Phase 1] Applied Force: 200.0 N Position: 10.5023 0.0 2.89132 m Velocity: 2.85721 0.0 1.65012 m/s Distance to incline: -0.5023 m Reached incline: Yes ✅ Successfully climbed incline with sufficient force.
Known Issues
- Physics Behavior
- Small forces (< μN) causing unintended motion
- Contact dynamics configuration needs tuning
- Physics step size effects present